Tommaso Lenzi: How CYBATHLON has created a positive impact for assistive device research
7th February 2024
CYBATHLON is more than just a competitive event. It pushes research teams and pilots to develop assistive devices that are useful in everyday life situations. Tommaso Lenzi, associate professor of mechanical engineering at the University of Utah and director of the HGN Lab for Bionic Engineering, tells us how CYBATHLON is helping shape assistive device research.
Hello Professor Lenzi, welcome. Can you please tell us about your background and the ultimate goals of your research?
My background is in robotics. I am particularly interested in prosthetics and exoskeletons, focusing mostly on the lower limb. It is multidisciplinary research at the intersection of robotics control, biomechanics and physical medicine. In my group, we want to integrate all these different disciplines together with the goal of developing assistive technologies that can help people to move and live independently.
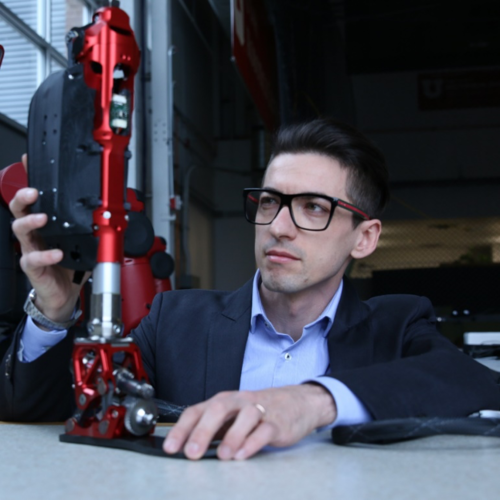
We developed the Utah bionic leg, a robotic leg prosthesis that enabled people to move and walk naturally by replacing the function of the missing biological leg. Its unique feature is that it is particularly powerful but still very lightweight, which is essential for individuals with amputation to be comfortable wearing all day in the real world.
What are the current challenges in leg prosthesis development?
There are two main challenges that we need to address. The first is related to mechanics. We need devices that are very robust, strong, and that can withstand everyday use. At the same time, they have to be very lightweight and efficient. It is very challenging to combine these requirements.
The other challenge that is fundamental for a robotic leg prosthesis to succeed is to fully integrate this artificial system with the user in a way that it is symbiotic, so that they feel like it is part of their body and can react to their intention to move in a way that is natural.

Can you see any future opportunities for the development of prosthetics using AI?
AI provides a great opportunity for prosthetics robotic leg prosthesis, but at the same time, it also provides a challenge.
Walking and gait is interesting because it is such a complex task and yet it is seamless. You don't think about it, flexing or extending your knee, moving your ankle. You just walk, right? That's what we want to achieve with a robotic leg prosthesis. This is really difficult to do in the real world, where the environment keeps changing with different terrains, slopes, stairs or obstacles that a person with a robotic leg prosthesis has to be able to handle.
AI can help us more accurately and quickly interpret the user's movement intention to generate movements in a robotic leg prosthesis that exactly match that without really having to think about it.
In your opinion, how does the CYBATHLON competition influence the field of rehabilitation robotics?
CYBATHLON has pushed the field, and especially the people in academia, to think about practical problems: The challenges people who need assistive technologies have to face in everyday life.
Before CYBATHLON, I think a lot of academics tended to focus a particular area of research, maybe just the mechanics, control theory, or only on the neural interfaces.
The tasks in CYBATHLON that mimic real-world challenges make it necessary for academics to work together to integrate these different research disciplines you need for assistive technology.

{kind=link}
{kind=link}
{kind=link}
What advancements have been made in rehabilitation robotics and prosthetics as a result of competitions like the CYBATHLON?
There is an evolution in technologies that can handle complex situations common in daily life that were not studied at length before.
One example I can give you is that there have been numerous studies done on walking, but most of them were done in a straight line and at constant speed. This is not how people walk in their daily lives; they encounter obstacles and inclines, they have to start and stop, they have to turn. These movements are included in CYBATHLON though, pushing researchers to look at how to address these challenges.
As a result, we have seen more control strategies and devices that are developed to deal with the variability in the real world.
What role does the CYBATHLON play in driving collaboration among researchers, engineers, and people with disabilities to create more effective and user-friendly solutions?
In our research, we value the input of the end users more than anything else. All our design projects start with end users working with us to identify problems with existing technologies and effective solutions that can be deployed in a short period of time.
For the Utah bionic leg, the starting point was really to talk to people with lower limb amputation and try and understand their needs, strength, and what they want in a prosthesis and try to implement these into our new design.
So we developed a prosthesis that is quite light in weight, which is something new that was driven by the feedback from the user who really wanted to have a lightweight device.
The way CYBATHLON is set up really requires the engineers and researchers to work with people with disabilities so they can integrate their feedback into their device design and controls. This creates opportunities for more effective mobility solutions.