
![]() Canada
Canada

About the Pilot
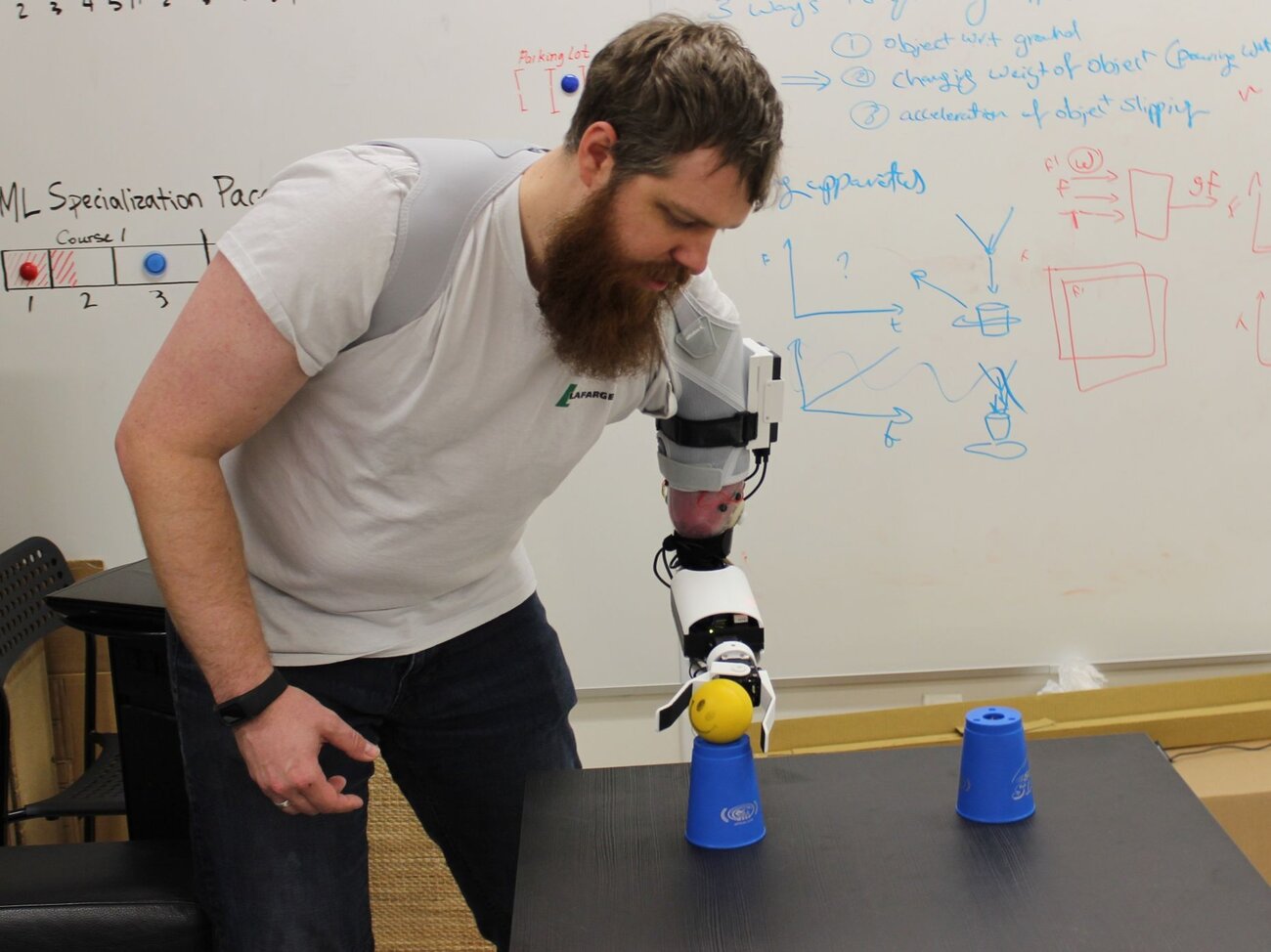
Chris is an above-elbow Pilot who is ready to push the limits of what is possible for multi-function prostheses. He has experience with both body-powered and myoelectric prostheses and is always willing to try new cutting-edge technologies including machine learning controllers and sensory feedback devices. When he’s not blazing through the competition course, he enjoys playing video games, listening to audiobooks, and writing campaigns as a dungeon master.

About the Device
The Bento Arm is a modular robotic arm system that includes up to 5 degrees of freedom (shoulder rotation, elbow flexion, wrist rotation, wrist flexion, hand open/close) and has been used in research and clinical training with persons with limb differences at the above and below elbow level for over a decade. It includes integrated sensors for measuring position, velocity, temperature, voltage and load, and can be combined with our sensory feedback systems to convey the sense of touch or position. The Bento Arm was also designed with an anatomical appearance and is compatible with several different hand options including 3D printed and commercial hands. It can also be combined with the HANDi Hand, a sensorised multi-articulated hand prosthesis that was developed in our lab and subsequently released open source. The Bento Arm and HANDi Hand are controlled via our brachI/Oplexus software which supports several human device interfaces and control options including conventional EMG control and state-of-the-art machine learning control solutions (i.e. adaptive switching or pattern recognition). Motivated to push our technology towards take home research trials and to compete in the CYBATHLON, our team has now moved beyond tethering the device to a laptop and developed a wearable controller and battery system that can be integrated directly into the Pilot’s prosthesis.


{kind=link}
{kind=link}