
![]() Kanada
Kanada

Über die Pilotin, den Piloten
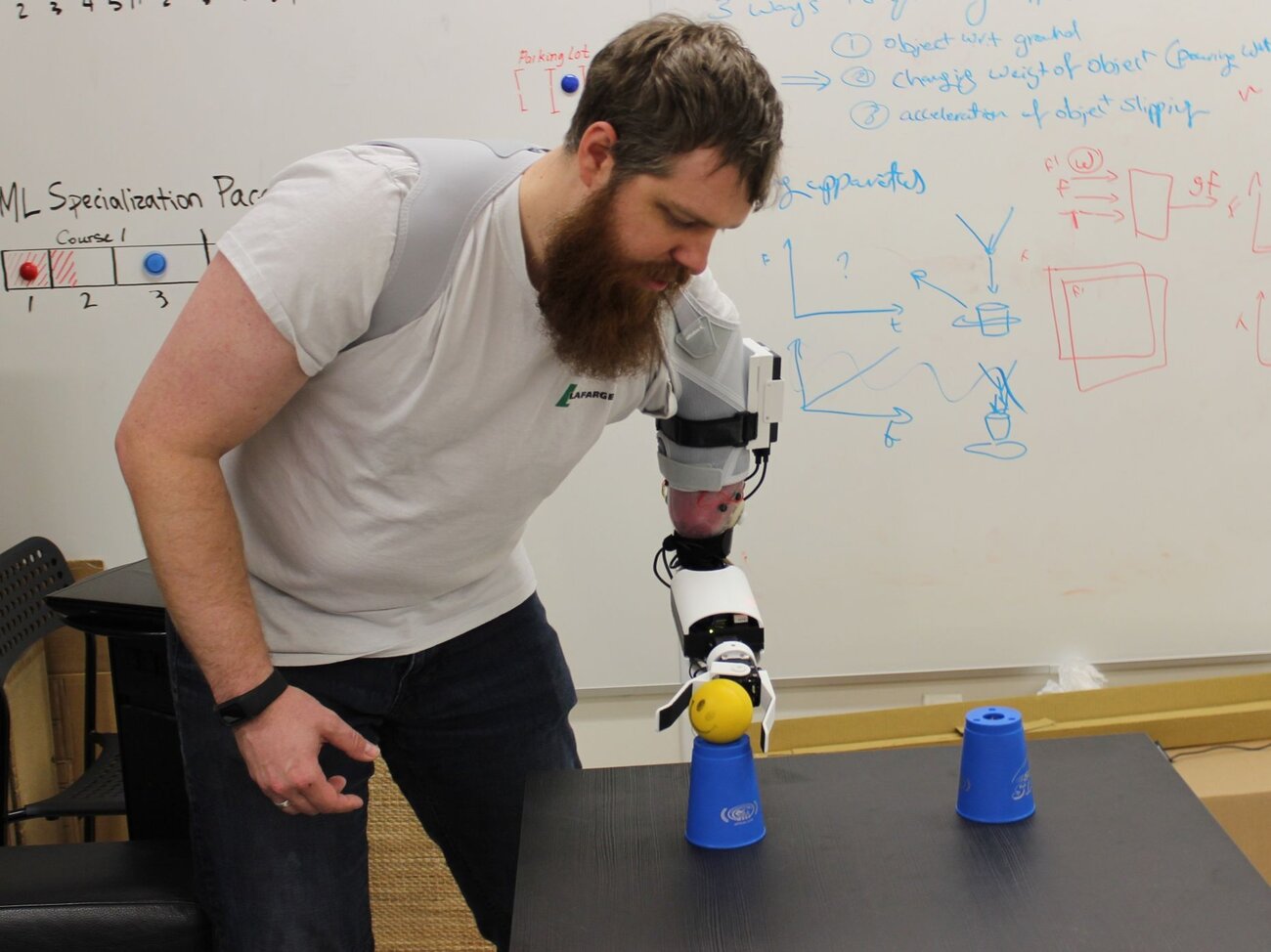
Chris ist Pilot, oberhalb des Ellbogens amputiert und bereit, die Grenzen des Möglichen für multifunktionale Prothesen zu erweitern. Er hat Erfahrung mit körperbetätigten und myoelektrischen Prothesen und ist immer bereit, neue Spitzentechnologien auszuprobieren, darunter maschinelle Lernsteuerungen und Geräte mit sensorischem Feedback. Wenn er nicht gerade auf der Rennstrecke unterwegs ist, spielt er gerne Videospiele, hört Hörbücher und schreibt Kampagnen als Dungeon Master.

Über das Gerät
Der Bento-Arm ist ein modulares Roboterarmsystem mit bis zu fünf Freiheitsgraden (Schulterrotation, Ellbogenbeugung, Handgelenkrotation, Handgelenkbeugung, Öffnen/Schließen der Hand), das seit mehr als einem Jahrzehnt in der Forschung und in der klinischen Ausbildung mit Menschen mit Gliedmaßendifferenzen im Ober- und Unterarmbereich eingesetzt wird. Er verfügt über integrierte Sensoren zur Messung von Position, Geschwindigkeit, Temperatur, Spannung und Belastung und kann mit unseren sensorischen Feedbacksystemen kombiniert werden, um den Tastsinn oder die Position zu vermitteln. Der Bento-Arm ist anatomisch gestaltet und mit verschiedenen Handoptionen kompatibel, darunter 3D-gedruckte Hände und handelsübliche Hände. Er kann auch mit der HANDi-Hand kombiniert werden, einer sensorbestückten, mehrgliedrigen Handprothese, die in unserem Labor entwickelt und als Open Source veröffentlicht wurde. Der Bento-Arm und die HANDi-Hand werden von unserer Software brachI/Oplexus gesteuert, die mehrere Schnittstellen und Steuerungsoptionen für menschliche Geräte unterstützt, darunter die konventionelle EMG-Steuerung und modernste Steuerungslösungen mit maschinellem Lernen (z.B. adaptives Umschalten oder Mustererkennung). Unser Team ist motiviert, unsere Technologie für Forschungsexperimente zu Hause weiterzuentwickeln und am CYBATHLON teilzunehmen. Es hat das Gerät von einem Laptop unabhängig gemacht und ein tragbares Steuerungs- und Batteriesystem entwickelt, das direkt in die Prothese des Piloten integriert werden kann.


{kind=link}
{kind=link}