Assistance Robot Race
People with severe motor impairments or missing limbs to both the upper and the lower extremities have limited autonomy when interacting with their physical environment resulting from their disability. Tasks such as shopping for groceries independently, eating and drinking, personal hygiene, or dishwashing are just a few examples in which these people might depend on a care person.
More on ROB RaceAssistance Robot Race Tasks

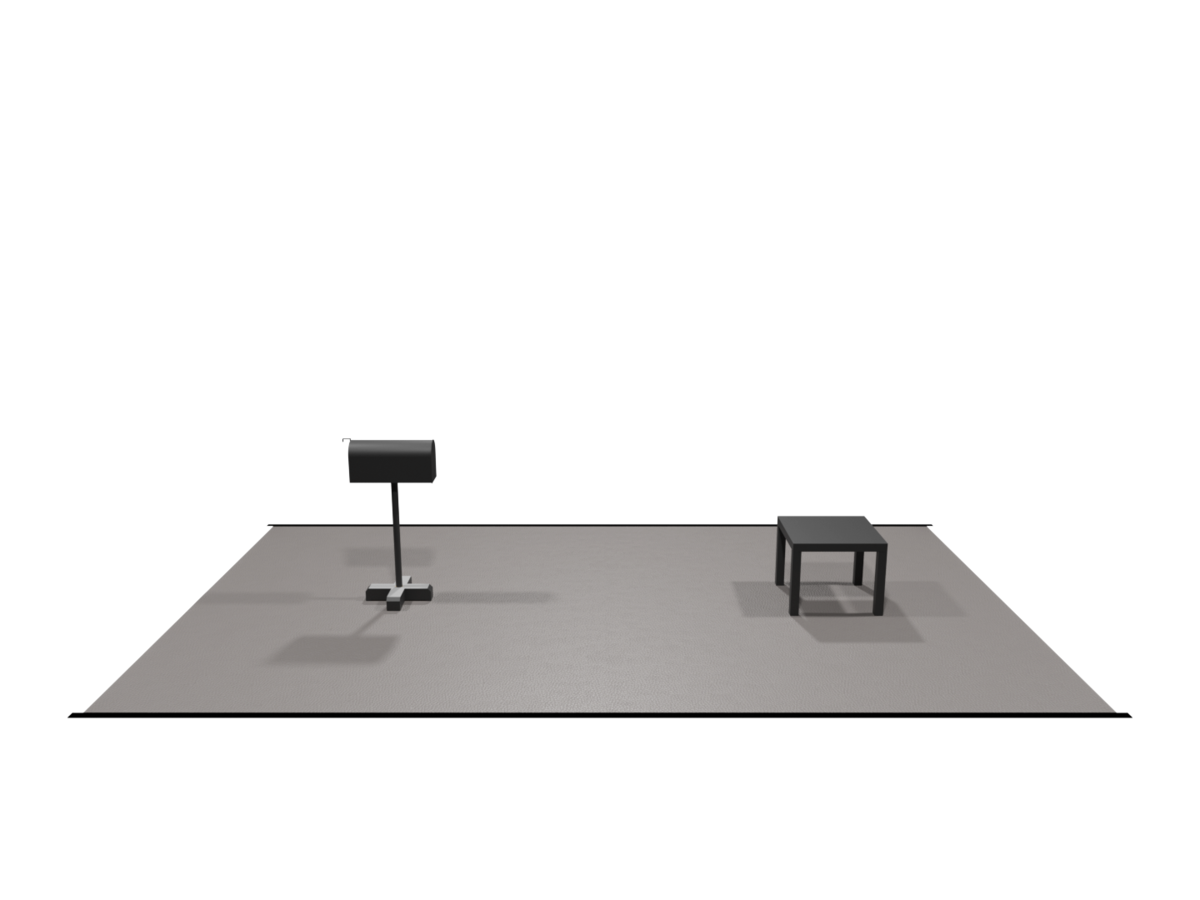
1. Mailbox
Grasping objects from within confined space can be of particular challenge to robotic grippers. Such tasks are further exacerbated if the object has a smooth surface and offers little to no opportunity to be gripped (e.g., due to size or the lack of a handle).
In this task, the pilot must remove a parcel from a mailbox and transport it to a target location.

2. Toothbrush
Many powered wheelchair users require the help of a caregiver to complete tasks of personal hygiene. For assistance robots, such situations pose a particular challenge. On the one hand, because the involved objects have heterogenic properties (e.g., shape, compliance, texture), on the other hand, due to the required interaction between the device and the pilot during which safety must be guaranteed at any time.
In this task, the pilot must use a toothbrush.

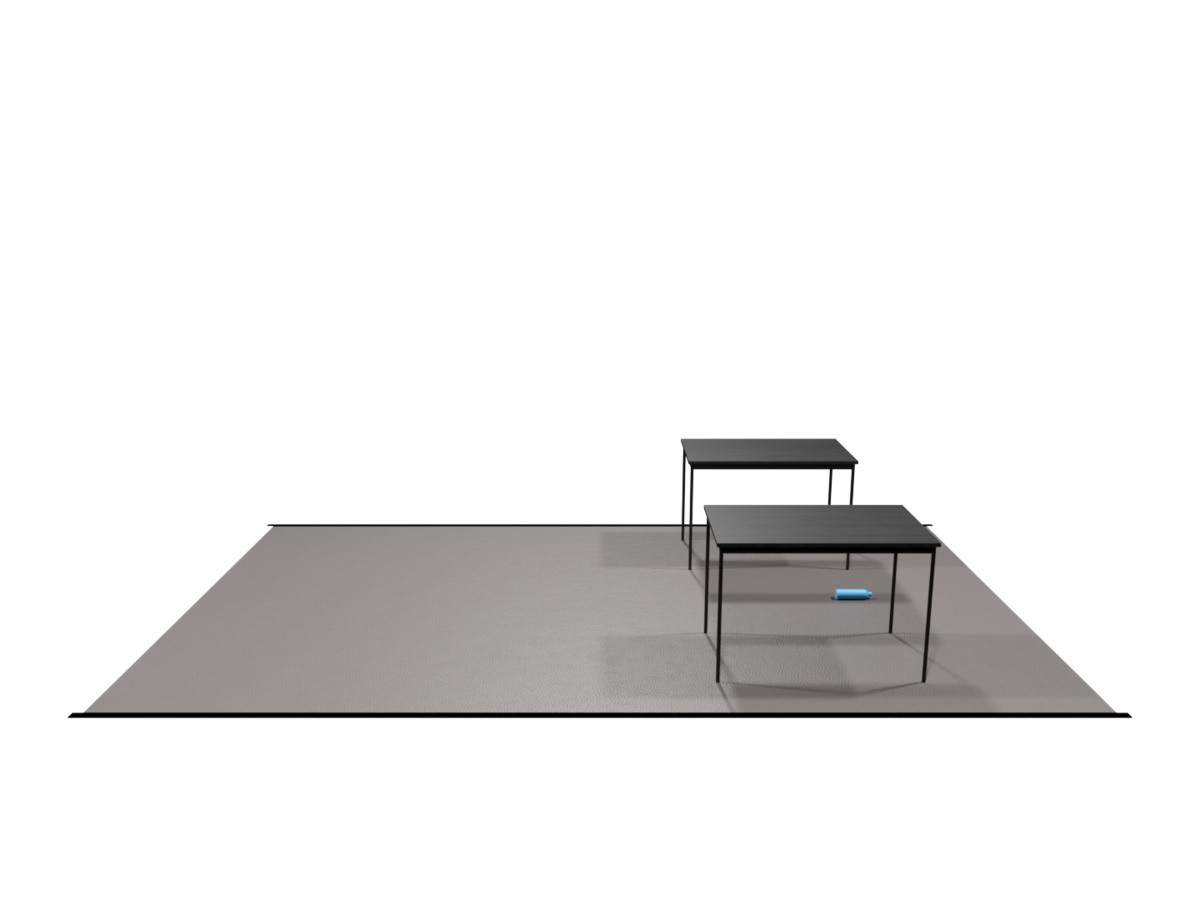
3. Pick Up
Items that are randomly lying around or felt on the floor (e.g., a child’s toys) can obstruct a wheelchair user’s path. He or she might want to pick up the objects to either use them or stow them away.
In this task, pilots must pick up a bottle from the floor and place it on a table.

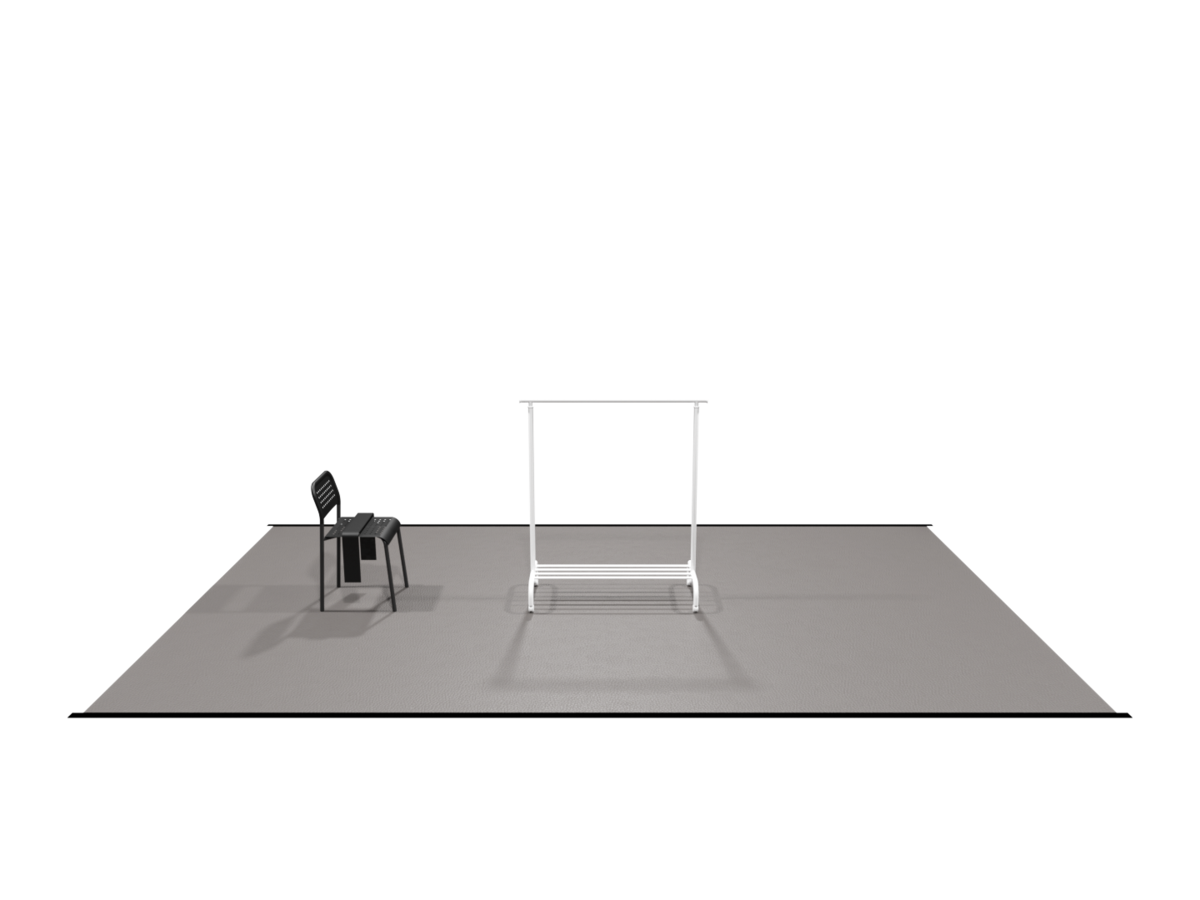
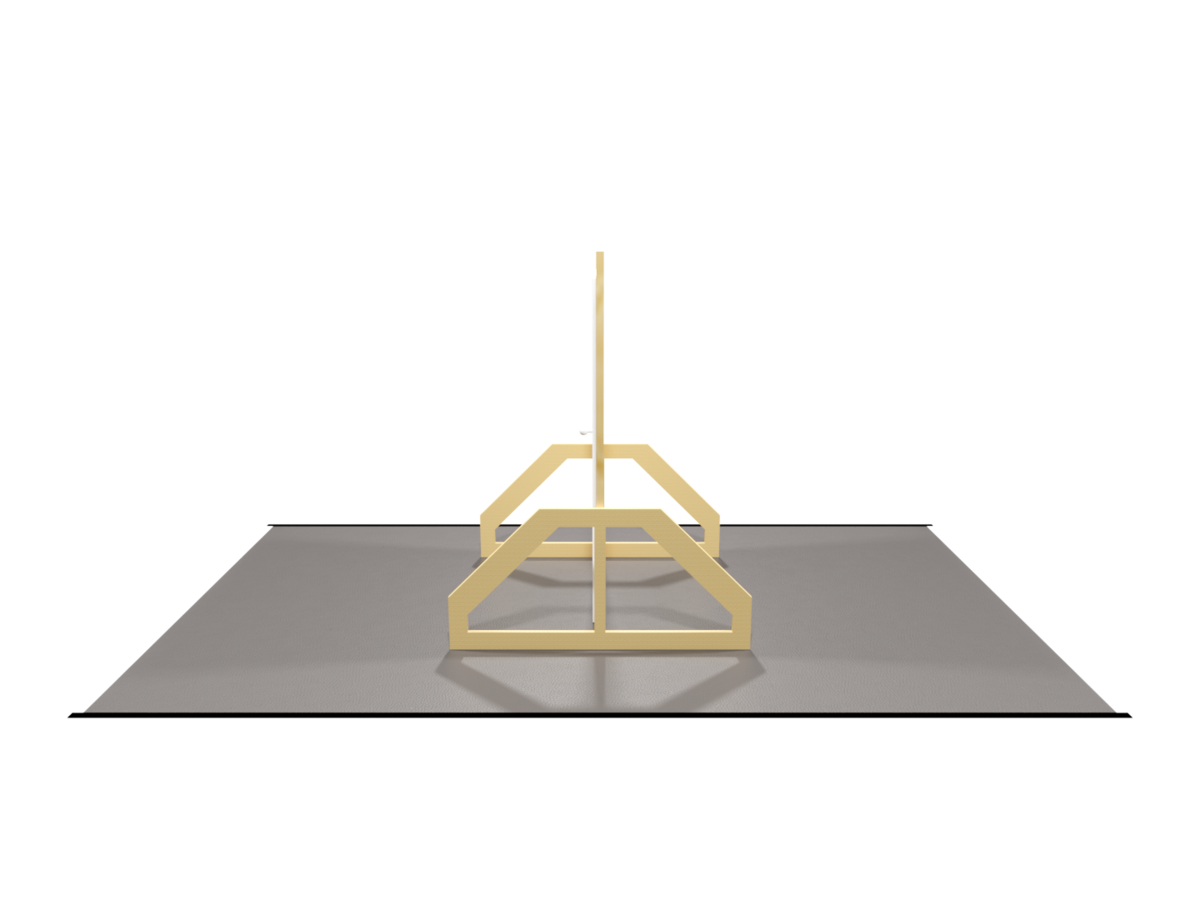
4. Scarf
Assistance robots must be able to carry out a multitude of manipulation tasks of a wide range of objects when carrying out household work. Soft objects such as cloth can be difficult to manipulate in particular.
In this task, the pilot must hang a scarf on a clothesline with the help of the assistance robot.

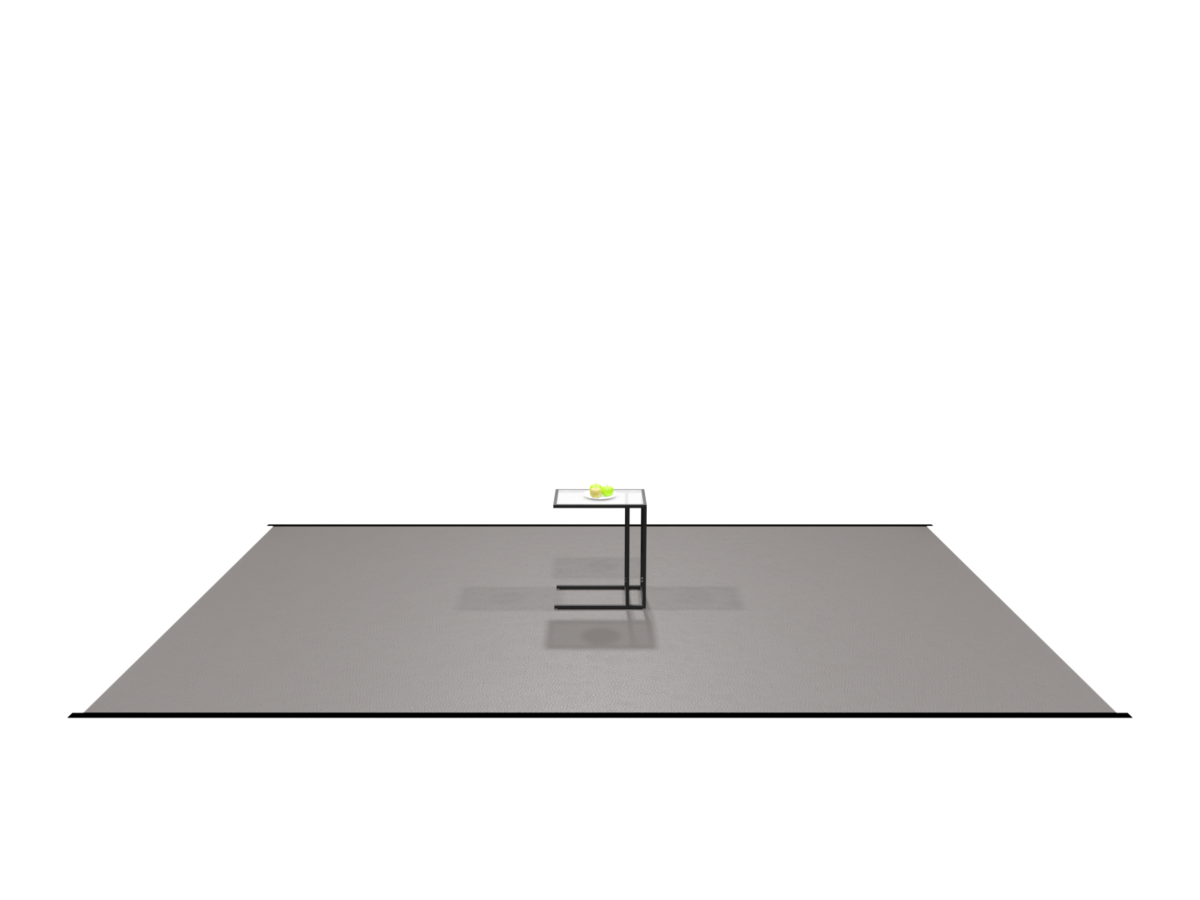
5. Eating
Eating and drinking are situations in which an assistance robot can be of great help to a user. Such situations pose a particular challenge to the control of the assistance robot. First, because the involved objects have heterogenic properties (e.g., shape, compliance, texture). Second due to the required interaction between the device and the pilot during which safety must be guaranteed at any time.
In this task, pilots must ‘eat’ an apple.

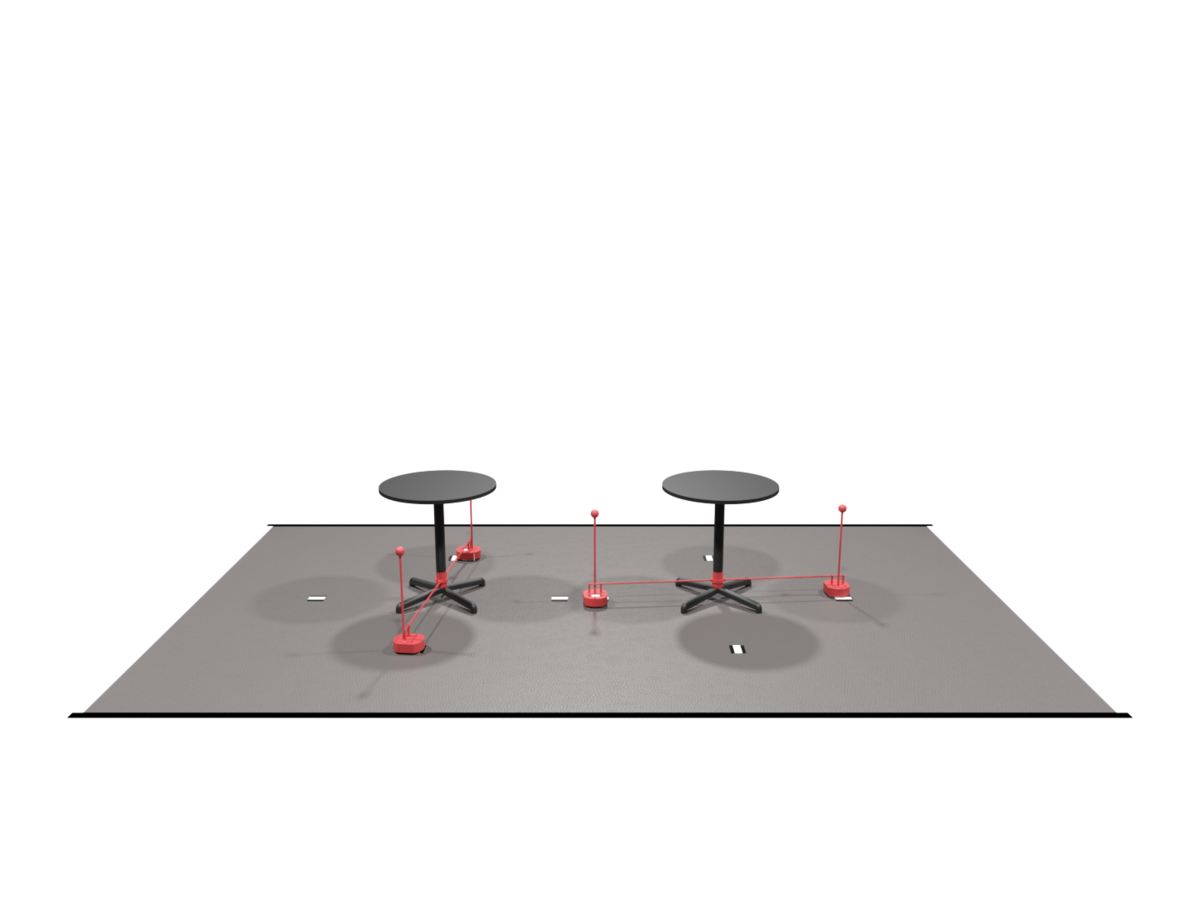
6. Crowd
Often in daily life, it is necessary to navigate around static or moving obstacles to reach a desired destination. When navigating in dynamic crowds, in particular, a constant control of direction and speed is required to avoid collisions.
In this task, pilots must pass between individual pieces of furniture. In addition, collisions with several robots that are roaming the task space must be avoided.

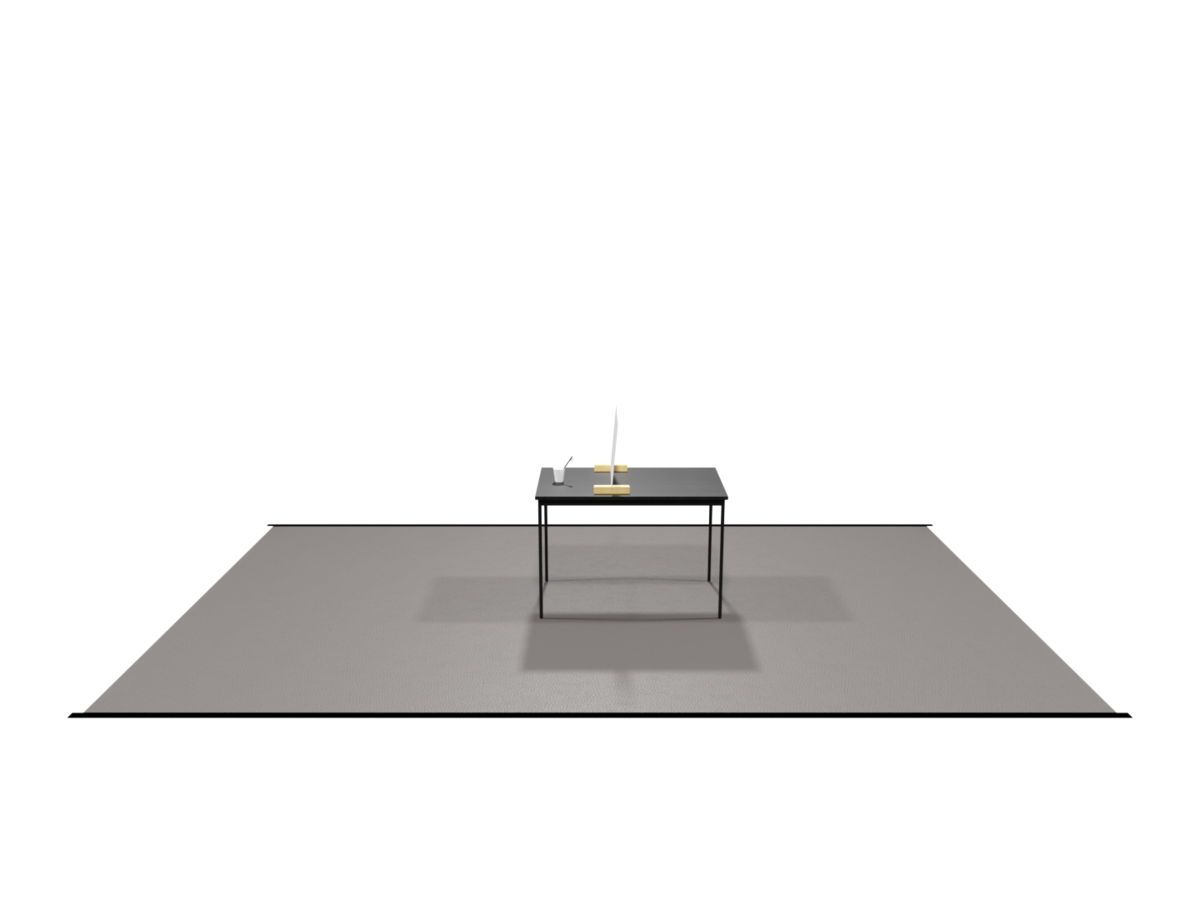
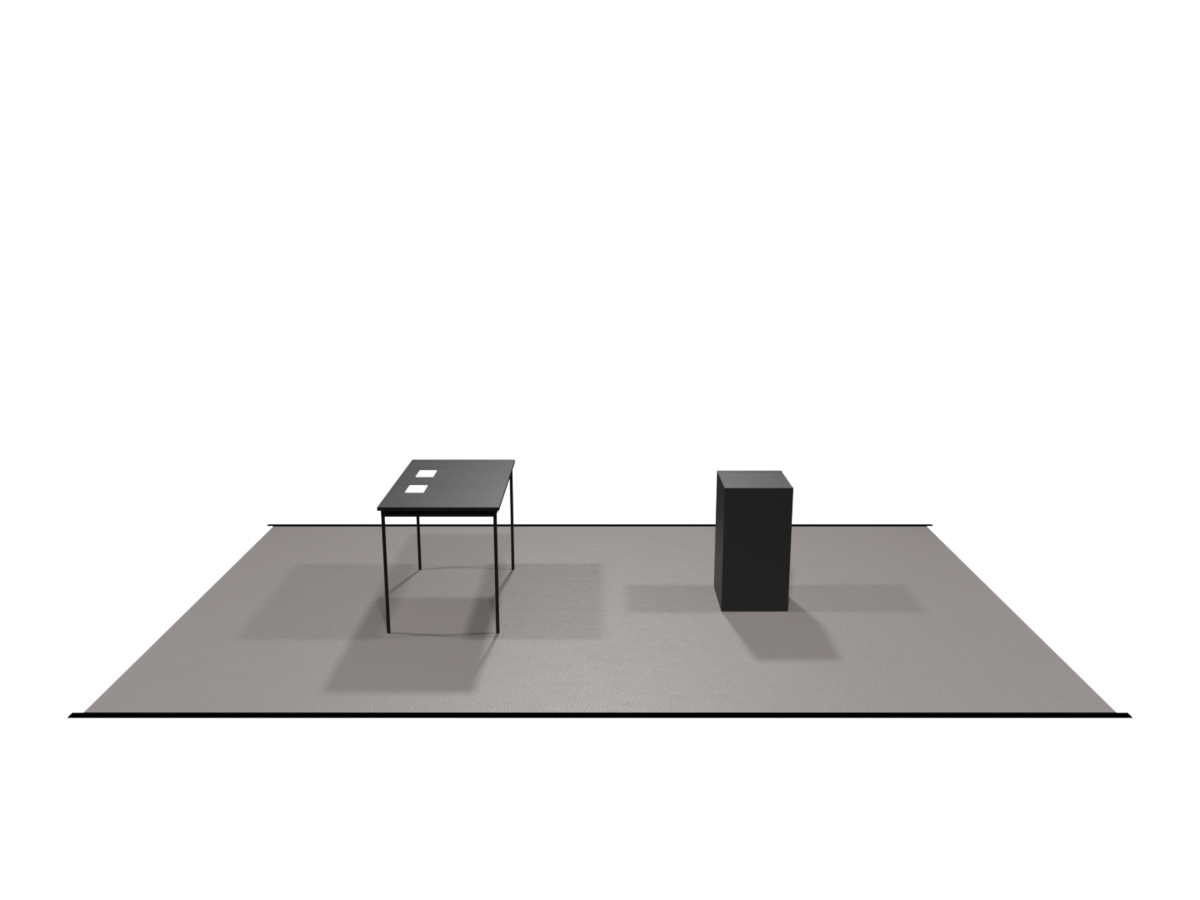
7. Spice up
Go and bring objects is a task in which assistance robots can be of significant help to their user. However, the variety of objects, their orientation and target locations make this type of task a challenge.
In this task, pilots must grab the correct object and place it at a predefined location.

8. Door
Opening and closing doors is challenging for a wheelchair user. There are different mechanisms to open the door (e.g., door handle or doorknob) and not all doors require the same amount of force to push or pull them open.
In this task, pilots must open, pass through, and close a door.

9. Touchscreen
Many user interfaces are nowadays based on touch screens (e.g., vending machines, and the menu in restaurants). Their use is primarily based on visual perception and some motor dexterity is required to use them.
In this task, pilots must navigate a touchscreen and order a predefined item from a variety of foods.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}